2018金磚+大賽之首屆“無人機應用技能”賽項技術規程(精簡版)
一、賽項名稱
賽項編號: BRICS08
賽項名稱:無人機應用技能大賽
英語翻譯:Drone Application Skills Competition
賽項組別:高職組
賽項歸屬產業:無人機應用類
二、競賽目的
本項賽事是在金磚國家“深化金磚伙伴關系,開辟更加光明未來”的時代背景下開展的一項大型賽事,通過成員國之間的交流合作,在金磚五國和一帶一路范圍內,促進無人機技術應用,推動無人機技術與產業應用結合。賽項體現了行、校、企聯合設計思路,將現代企業的產品開發與實際生產過程設計到賽項中,以無人機組裝、調試、應用飛行為內容,針對顯示無人機行業典型工作崗位,培養學生無人機應用技能,達到以賽促教,以賽促學的目的,使學校能夠更好地建設專業,提高教學質量,創新教學模式。
三、競賽內容
競賽內容將以任務書形式公布,賽前需要統一培訓,如果報名人數超過30隊,舉行預選賽進行選拔。如果舉行預選賽,成績按照整體參賽隊伍大排名,選擇前30隊伍參加決賽,決賽參賽隊伍原則上為30個隊伍。
經過對無人機行業進行深入的調研得知,隨著無人機行業快速發展,無人機飛手、無人機調試、無人機組裝等工作崗位人才短缺。通過大賽能夠讓學生對以上典型工作崗位的人員的技能培養,為職業院校專業建設奠定堅固基礎,目的是為企業培養出此專業方向的緊缺人才。
整個競賽過程,總的競賽時間為3小時25分鐘,分為第一階段理論及法規考核(30分鐘),第二階段穿越機設計作品答辯(15分鐘進行答辯環節,無人機設計組裝需在場外完成,將設計好的產品帶入現場),第三階段無人機組裝調試(1小時),第四階段無人機飛行應用(1小時40分鐘),這四階段可以分離競賽,四個階段權重分別為10%,20%,20%,50%。
1、第一階段:理論及法規考核
該階段競賽時間為30分鐘。
該階段重點考核:飛行原理、飛行器結構組成、多旋翼原理、導航知識、無人機飛行管理法規、無人機操控職業素養;
該階段為標準化試卷(單項或多項選擇題),采用人工或網絡考核方式進行。
2、第二階段:穿越機設計作品答辯
該階段競賽時間為15分鐘,其中答辯陳述10分鐘,專家提問評分5分鐘。
無人機設計組裝需在場外完成,將設計好的產品帶入現場,需提供產品BOM清單,設計圖紙,組裝好的無人機。
答辯重點考核:創新素養、穿越機綜合應用能力、穿越機成本考核;選手需將按要求設計的穿越機帶到現場進行職業技能解析。主要考核選手應用制圖設計、機械加工等綜合知識進行創新設計的能力。根據任務書和機械設計、機械制造工藝水平和創新點的優劣程度評分。
參賽選手還需圍繞“無人機裝配、調試和飛行”等幾個方面,進行技術文件展示及答辯匯報。答辯展示主要考察選手在執行工作任務過程中的直觀展示性、功能性、價值導向性、經濟性、生產和工作過程導向性、社會接受度、環保性、創造性等八個方面的職業能力。
3、第三階段:無人機組裝調試
該階段競賽時間為1小時,競賽隊完成三項競賽任務。
任務1:無人機組裝。利用指定無人機組裝設備XXQY-UAV-01,設備中包含組裝過程中所需全部工具,需對產品進行結構組裝。模塊主要考核選手對無人機的電子工藝以及無人機組裝能力;
任務2:無人機飛控調試。基于任務1內容,通過地面站軟件MissionPlanner,對無人機飛控進行調試, 其中包含機型選擇、加速度計校準、磁羅盤校準、遙控器校準、電調校準、內部參數設定、解鎖速度等調試內容;模塊主要考核選手對無人機飛控調試、內部參數設定的調試能力;
任務3:無人機整機聯調。基于任務1和任務2內容,加上遙控器,通過地面站軟件MissionPlanner,對無人機進行整機調試,其中包含遙控器設置、接收機模式、飛行模式設置、遙控器解鎖功能測試等內容;模塊主要考核選手對無人機整機調試的能力。
4、第四階段:無人機飛行應用
競賽時間為1小時40分鐘,競賽隊完成三項競賽任務。
任務1:穿越機競速飛行(穿越機為選手自行設計的第二階段的原機型)。競賽時間為30分鐘,兩次機會取最好成績,飛行過程中不得飛過安全線,如有飛過,此次飛行計零分,FPV眼鏡用戶可自選是否使用。利用指定無人機穿越機裝備XXQY-UAV-02,按照下面的路徑示意圖 1飛行,飛行區域設置 5 個 障礙圈位置,1#、3#、4#、5#是直徑100cm 中心高度 2.5~5m 的圓形圈,2#是位于場地中心的半圓拱門圈(直徑約 2.5 米)。選手從起降點起飛后必須按 1#→2#→3#→4#→2#→5#→1#穿圈順序飛行2圈,最后一圈從 5#→起降點,飛行穿越圓圈時要求機頭方向指向前進方向(即和圖中箭頭方向一致) ,裁判記錄飛行時間和穿越成功次數。
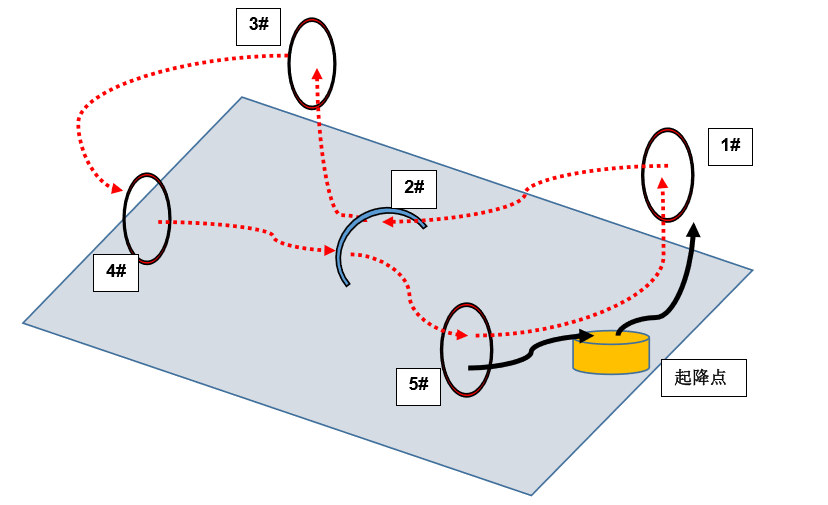
圖1
任務2:飛行操控基本功考核。競賽時間為30分鐘,兩次機會取最好成績,飛行過程中不得飛過安全線,如有飛過,此次飛行計零分。
利用指定無人機裝備XXQY-UAV-05,按照下面的路徑示意圖 2飛行,在手動控制模式狀態下起飛,要求從起飛點垂直直線起飛(目測不能偏移出黃色區域),在離地高度 3 米~3.5 米范圍內懸停 20~30 秒,懸停期間要求完成一個自轉 360 度偏航動作;然后繞 2 根相距 6 米的桿飛行水平 8 字一個來回(飛行時機頭方向指向前進方向,不能觸碰立桿);最后降落在起飛點(圖中起降點的中心圓區域),降落時飛機機身部位除槳葉外其他均不能壓上黃色區域。
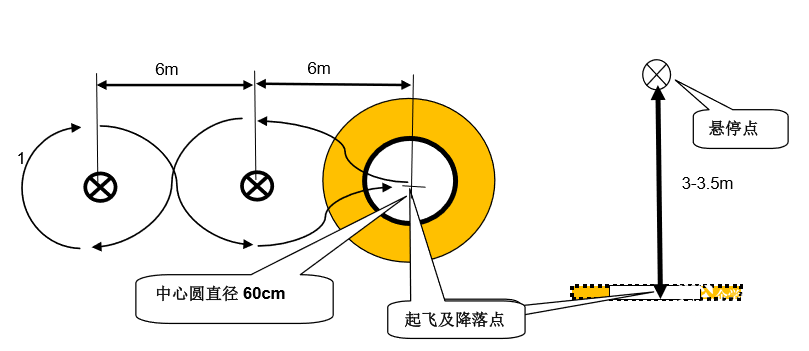
圖2
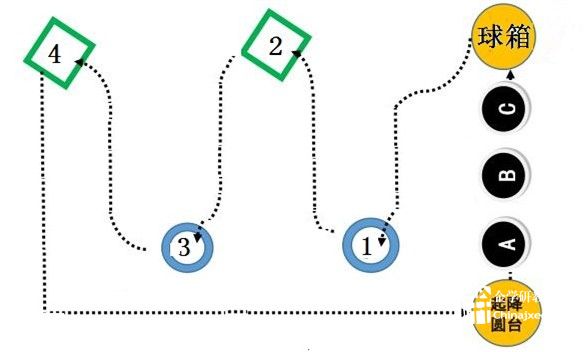
任務3:四旋翼無人機應用技能。競賽時間為40分鐘,兩次機會取最好成績,飛行過程中不得飛過安全線,如有飛過,此次飛行計零分。
本賽項主要考核應用無人機物流運輸,越障飛行應用綜合能力。開始前選手需抽簽,抽取所需抓取球的顏色,利用指定無人機裝備XXQY-UAV-05,操控飛機從起點起飛,前往抓取點(球箱)抓取相應顏色的球,球箱中共有A、B、C三種顏色的球。然后按如圖 3所示①-②-③-④的路徑穿越障礙飛行,然后將球放到A、B、C相應顏色桶里,最后將飛機降到起降點。
圖3
四、技術規范
本賽項要求具有的知識點、基礎技術要求和技能要求為無人機組裝、調試、飛行的應用等課程實訓所涵蓋的內容。
本賽項要求掌握的操作規程為競賽指定設備所規定安全操作規程,詳見設備使用手冊。
五、技術平臺
(一)計算機平臺
賽場提供同一配置的計算機及軟件。
1.硬件基本配置:雙核處理器/4G內存/1T硬盤/1G獨顯/19寸LED顯示器;
2.預裝軟件 :
(1)操作系統: Windows 7;
(2)文字處理軟件: Office 2017;
(3)設計、編程軟件:MissionPlanner。
(二) 無人機組裝調試
比賽用的無人機組裝調試設備選用XXQY-UAV-01型無人機組裝實訓系統。主要參數如下:
| 序號 |
分類 |
說明 |
數量 |
單位 |
| 1 |
實驗箱 |
尺寸:500*360*130mm,金屬外殼箱體結構,內部采用EVA設計,獨立鑰匙。 |
1 |
套 |
| 2 |
無人機結構件 |
智能飛控、飛控保護板、2200mAh鋰聚合物電池組 3S、BB響、鋰電池平衡充電器、電子調速器、電源分線板、飛控供電線、3.5mm母香蕉頭、4mm熱縮管(黑色)、4mm熱縮管(紅色)、14#AWG硅膠線、16#AWG硅膠線、T形插頭、反轉無刷外轉子電機、正轉無刷外轉子電機、正螺旋槳、反螺旋槳、旋槳支撐墊、電機座、機臂、管夾、長鋁柱、短鋁柱、中心板、云臺掛載板、減震海綿、腳架橫撐、三通、0-90°腳架斜撐、背膠魔術貼、飛控數據下載線、長(短)螺絲、2.0毫米內六角螺絲刀、2.5毫米內六角螺絲刀、3M雙面膠、剝線鉗、電烙鐵、電烙鐵底座、特尖烙鐵焊頭、馬蹄烙鐵焊頭、刀狀烙鐵焊頭、助焊松香、高純度活性焊錫絲、反扣扎帶、8IN1模擬器、GPS(內置羅盤)、數傳電臺等。 |
1 |
套 |
| 3 |
軟件系統 |
模擬飛行軟件。 |
1 |
套 |
| 4 |
地面站軟件。 |
1 |
套 |
| 5 |
軟件狗 |
實現模擬飛行軟件與遙控器連接授權。 |
1 |
套 |
| 6 |
遙控器 |
樂迪9通道遙控器配9通道接收機和3S遙控器專用電池。 |
1 |
套 |
1.整機采用碳纖維和航空鋁設計,固定牢固,質量輕,整機重量(包含機架,電機,螺旋槳,電池,gps,電臺)約為1063g。
2.鋰聚合物電池組:格氏品牌3S 2200mAh。
3.鋰電池平衡充電器:自動檢測電池數和容量,自動設置充電輸出,鋰電池集成電池電壓平衡器,高精度的充電鋰余額+/-0.01V,高功率,高性能充電器,XH-樣式脂質平衡端口的,電源輸入為DC11~18V/ AC100至240V。鋰充電速率高達5.0安培(最大50瓦),鎳氫充電速率高達到5.0安培(最大50瓦),輸出功率為50瓦,充電速功率:1.5C,電池類型:鋰電2~6S(系列)/鎳氫電池的1至15Cells。
4.電子調速器:30A無刷電調,自動調教油門,采用進口MOS管,同步整流技術,效率高,熱損小,溫度低。
5.電源分線板:雙路可調3-20V BEC輸出,每路可輸出2-3A。
6.電烙鐵:60W恒溫內熱電烙鐵,M7恒溫芯片,進口陶瓷芯,防靜電防擊穿。配有烙鐵架,海綿,焊錫絲,松香,特尖頭,刀頭,馬蹄頭。
7.內六角螺絲刀:2.0毫米和2.5毫米個一把,進口白鋼,12.9級硬度。
8.GPS:內置羅盤,工作電壓DC5V,搜星時間約為20S,精度0.9米左右。
9.數傳電臺:CP2102高品質USB轉TTL芯片, 915MHZ ,支持MWC/APM/PX4/Pixhawk等開源飛控,接收靈敏度為 -118 dBm,全雙工通信2路自適應TDM,可以矯正高達25%的數據位錯誤,基于Si1000微控制器和Si4432無線模塊。
10.無刷外轉子電機:采用T-MOTOR電機正反自鎖槳電機,型號為2213,KV950。
11.智能飛控----無人機智能控制核心,大腦。
智能飛控(自主研發,仿冒必究)整體采用航空鋁外殼設計,螺絲采用鋁材質,質量輕,減少磁干擾,增強飛控穩定性。智能飛控創新設計,是飛控性能更穩定,其中,控制芯片采用雙單片機控制,兩套姿態傳感器和氣壓高度計,均采用原裝進口芯片。智能飛控使用可靠的miniUSB,開口向上滿足飛行器各種安裝方式下方便使用,免于外接USB接口。集成空速傳感器,可以支持固定翼全自主起降航線飛行。免于外接空速傳感器模塊,可直連空速管。開放兩個單片機SWD仿真調試接口,可以滿足各種層次開發者需求,甚至可以把它當做集成傳感器的單片機板,從零開始編寫底層代碼。集成多組外設I2C總線接口,免于外接轉換器。開放內置I2C接口。集成獨立高電壓測量接口,可以測量12s電源,免于連接3dr模塊。集成蜂鳴器,免于外接蜂鳴器模塊。突出外殼的獨立外部固定孔,可以靈活外接螺釘可靠固定或可調節硬度減震器。
智能飛控能夠實現多旋翼無人機和固定翼無人機的全部功能,該智能飛控主要配有15個傳感器模塊和10個外接接口。
(三) 穿越機競速飛行
比賽用的穿越機競速飛行設備為第二階段穿越機設計技能及答辯的設備,所設計設備需滿足以下要求:
無人機軸距小于等于250mm;電機kv值小于等于2300kv;螺旋槳尺寸為4寸/5寸/6寸;電調小于等于30A;電池需滿足1300mah, 4s,14.8v,75C;飛控為F4飛控;FPV第一視角眼鏡,圖傳,攝像頭等不做要求,可自行選擇,可選擇不用。
(四) 飛行操控基本功考核和四旋翼無人機應用技能
比賽用的穿越機競速飛行設備選用XXQY-UAV-05型無人機加載實訓系統。主要參數如下:
| 序號 |
分類 |
說明 |
數量 |
單位 |
| 1 |
實驗箱 |
金屬外殼箱體結構,內部采用EVA設計,獨立鑰匙。 |
1 |
套 |
| 2 |
無人機整機(組裝好) |
智能飛控、4000mAh鋰聚合物電池組 4S*2個、好盈4和1電子調速器、飛控供電線、3.5mm母香蕉頭、4mm熱縮管(黑色)、4mm熱縮管(紅色)、14#AWG硅膠線、16#AWG硅膠線、T形插頭、反轉無刷外轉子電機、正轉無刷外轉子電機、正螺旋槳、反螺旋槳、電機座、機臂、管夾、長鋁柱、短鋁柱、中心板、云臺掛載板、減震海綿、腳架橫撐、三通、0-90°腳架斜撐、背膠魔術貼、飛控數據下載線、長(短)螺絲、2.0毫米內六角螺絲刀、2.5毫米內六角螺絲刀、1.5毫米內六角螺絲刀、5.5套筒、3M雙面膠反扣扎帶、兩軸云臺、小蟻相機、內存卡、圖傳、5寸顯示屏等。 |
1 |
套 |
| 3 |
軟件 |
地面站軟件。 |
1 |
套 |
| 4 |
遙控器 |
樂迪9通道遙控器配9通道接收機和3S遙控器專用電池。 |
1 |
套 |
1、鋰聚合物電池組:格氏4000mah,4s,25c,2塊。
2、內六角螺絲刀:2.0毫米、2.5毫米、1.5毫米、5.5box套筒各一把,進口白鋼,12.9級硬度。
3、無刷外轉子電機:采用T-MOTOR電機正反自鎖槳電機,型號為2213,KV950。
4、兩軸云臺:1、支持供電電壓反接保護及電壓補償。2、支持電機驅動端短路保護。3、支持初始俯仰角自定義。4、支持感度參數調節和軟件三維姿態顯示。5、支持搖桿速率模式和位置模式。6、支持接收機:常規接收機、S-BUS接收機,DSM2/DSMJ/DSMX接收機。7、支持遙控設備:PPM/PCM/2.4G 。8、工作電壓:DC 7.4V~14.8V (推薦12V,三節鋰電)。9、工作電流:200mA-500mA(與供電電壓及電機功率有關)。10工作環境溫度:-15℃~65℃。11處理器為雙32位高速ARM核處理器。12傳感器為三旋翼MEMS陀螺儀和三旋翼MEMS加速度計。13最大角速率:2000°/sec。14最大加速度:16g。15控制頻率:2000Hz。16、電機驅動頻率:20KHz(無噪聲平滑驅動) 。17、控制精度:0.1°。18、控制角度范圍:-45°~45°(滾轉),-135°~90°(俯仰)。19、姿態解算算法為專用于無刷電機驅動云臺的解耦EKF算法。
5、運動相機:采用專業運動視頻處理器A7LS圖像處理器,開創性的圖像處理技術結合超高速下昂速處理、動態范圍增強、噪點消除算法,獨有的高保真H264編碼,提供最高品質的高清影像。索尼1600萬像素CMOS圖像傳感器,采用背照式圖像傳感技術,具有高感光,低噪點的特點。超大廣角155度。高速攝像1080P60幀/秒。內存卡8g。
6、圖傳:采用5.8G 200MW 32頻航拍專用圖傳,發射頻率: 5.6-5.9Ghz,電壓輸入: 7-24V,發射功率:200mw,工作電流: 190mA /12V,工作溫度: -10-+85℃,視頻帶寬: 8M,音頻編碼: 6.5M。
7、5寸顯示一體機:480×272(SD 版),背光源 LED,450 cd/m 2 (SD 版),顯示比例 16:9,響應時間 10ms,色彩制式 PAL/NTSC,電源 內置電池工作時間 2.5-3 小時,輸入 信號 視頻(PAL/NTSC),輸出 信號 視頻信號,配天線 接口類型 RP-SMA 內螺紋,內孔,5.8G 靈敏度 -94db。
六、 成績評定
本賽項評分標準按競賽任務分述如下:
(一)評分指標體系
| 比賽內容 |
模塊 |
考核指標 |
比例 |
| 理論及法規考核 |
第一階段 |
飛行法規、飛行原理等 |
10% |
| 穿越機設計技能 |
第二階段 |
制圖設計、機械加工、答辯 |
20% |
| 無人機組裝調試 |
第三階段
任務1 |
無人機機構組裝 |
4% |
第三階段
任務2 |
無人機飛控調試 |
8% |
第三階段
任務3 |
無人機整機聯調 |
8% |
| 無人機飛行應用 |
第四階段
任務1 |
穿越機競速飛行 |
15% |
第四階段
任務2 |
飛行操控基本功考核 |
10% |
第四階段
任務3 |
四旋翼無人機應用技能 |
25% |
(二)穿越機設計技能及答辯---評分標準,總分20分。
| 考試內容 |
評分標準 |
標準分 |
| 答辯展示 |
結構設計,需提供設計圖紙(紙質三份) |
4 |
| 節約成本,需提供產品bom |
4 |
| 人性化設計,產品外觀 |
2 |
| 環保與創新性,4個創新點 |
8 |
| 表達 |
8 |
(三)無人機組裝調試---評分標準
| 序號 |
考試內容 |
評分標準 |
標準分 |
| 1 |
機架組裝 |
以下中心版安裝、機臂及電機座、云臺掛載板和飛控保護板、腳架安裝4部分進行評分。 |
4 |
| 1、全部組裝合理,固定牢固,得滿分。 |
| 2、部分組裝不合理,不牢固,每部分扣1分。 |
| 2 |
電機安裝 |
以下電機位置、電機正反轉2部分進行評分。 |
2 |
| 1、電機位置和電機正反轉都正確,得滿分。 |
| 2、電機位置或電機正反轉安裝錯誤,每部分扣除1分。 |
| 3 |
電源分控板焊接 |
以焊接牢固沒有虛焊、美觀2部分進行評分。 |
2 |
| 1、焊接牢固,沒有虛焊,美觀,得滿分。 |
| 2、有虛焊不牢固貨不美觀,每部分扣除1分。 |
| 4 |
遙控器設置 |
以下搖桿模式(美國手模式)、機型選擇、接收機模式SBUS、切換飛行模式4部分進行評分。 |
4 |
| 1、全部設置正確,得滿分。 |
| 2、部分設置不正確,每部分扣1分。 |
| 5 |
無人機校準 |
以下模型選擇、加速度計校準、陀螺儀校準、遙控器校準、飛行模式(三種,包含自穩、定高、自動降落)、電調校準6部分進行評分。 |
6 |
| 1、全部設置正確,得滿分。 |
| 2、部分設置不正確,每部分扣1分。 |
| 6 |
整機調試 |
以下遙控器解鎖、遙控器控制電機2部分進行評分。 |
2 |
| 1、全部設置正確,得滿分。 |
| 2、部分設置不正確,每部分扣1分。 |
(四)無人機飛行應用---評分標準
| 內容 |
標準分 |
| 穿越機競速飛行 |
15 |
| 1 |
穿越每個圓形圈 |
1#、3#、4#、5#圈共2次,按機頭方向每穿越一次,得0.5分,未按機頭方向過圈得不得分 |
4 |
| 2 |
穿越拱形門次數 |
2#拱形門共4次,按機頭方向每穿越一次,得0.5分,未按機頭方向過圈不得分 |
2 |
| 3 |
記錄飛行時間T=? |
達最少飛行時間得滿分,每超過1%扣0.1分,扣完為止 |
6 |
| 4 |
飛機正常降落在起降區域 |
需要飛機中心降落在區域內,中心壓線不得分 |
1 |
| 飛行操控基本功考核 |
10 |
| 1 |
在起飛點垂直起飛 |
偏移小于30cm |
3 |
| 2 |
距起點3--3.5m的垂直高度內手動懸停30秒 |
高度和懸停時間各占2分,高度和懸停偏移小于30cm得滿分 |
4 |
| 3 |
高度3-3.5m處偏航自轉360 |
高度1分,旋轉2分,高度和旋轉偏移小于50cm得滿分 |
3 |
| 4 |
s形路徑飛行,水平8字 |
觸碰桿一次扣0.5分,沒有完成8字得0分,8字重疊扣1分,未按機頭方向飛行直接扣2分 |
3 |
| 5 |
降落在起降平臺內 |
僅機身,漿葉不管,腳架不得超出起降平臺 |
2 |
| 四旋翼無人機應用技能(越障、物流) |
25 |
| 1 |
越障技能 |
穿越1,3每項得1分,未按機頭方向過圈不得分,穿越2、4每項得2分,未按機頭方向過圈不得分 |
6 |
| 2 |
物流 |
抓取到所抽顏色球得4分,放到指定球桶得4分,飛行過程中球掉,總分扣8分。 |
8 |
| 3 |
完成飛行時間 |
最快速度為滿分,其他和最短時間比較,1%一個階梯,扣0.1分,扣完為止 |
11 |